Purpose of the LISN:
1. Provide well defined RF impedance to the DUT.
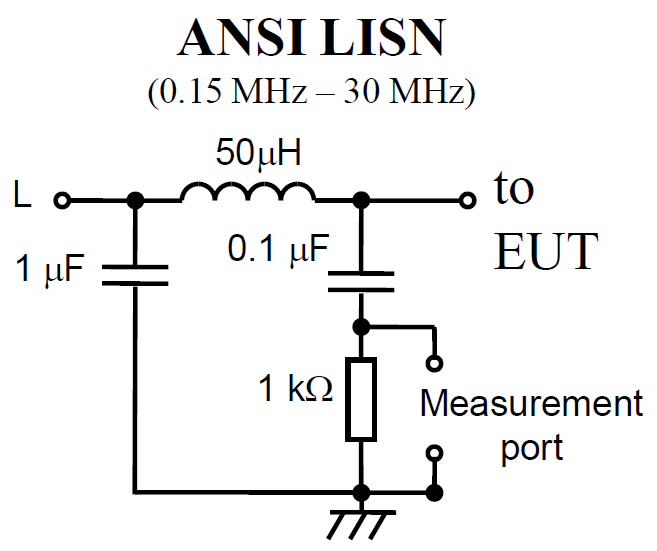
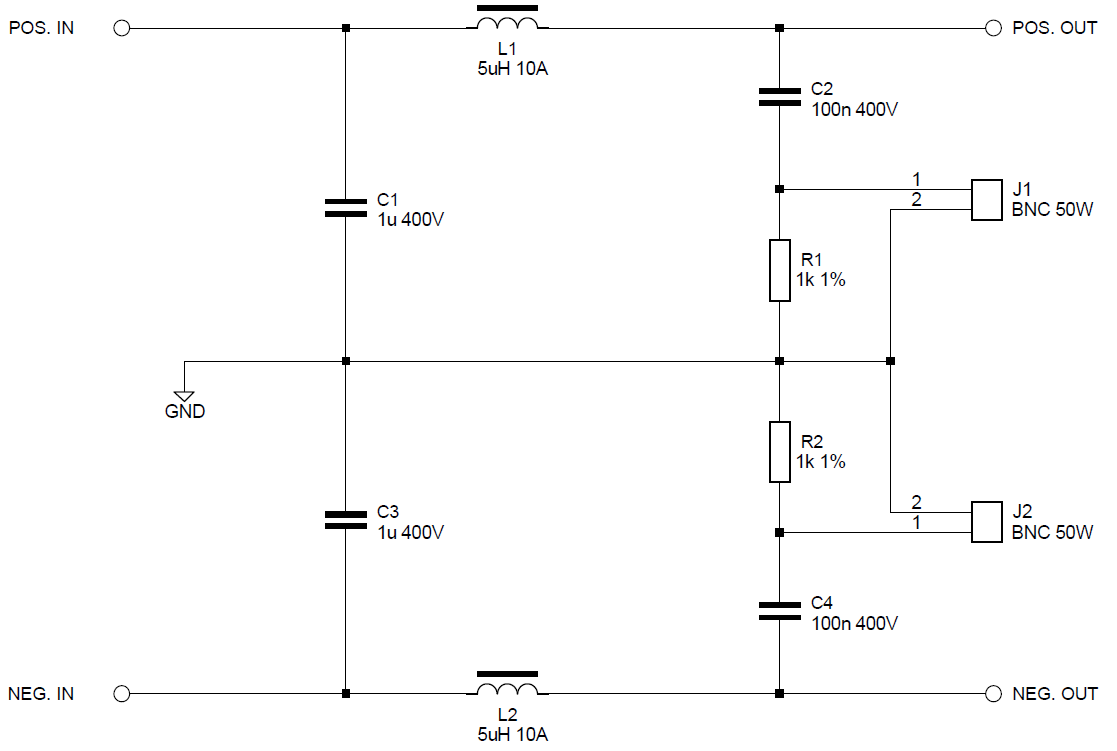
2. The 1μF & 50μH filter isolates the noise that is put on the supply lines by DUT from feeding back to the power supply / battery.
3. Provide a low impedance path for the noise to be measured at the output port of the LISN coupling the interference voltage generated by DUT via 0.1μF to the analyzer or receiver.
The role of the LISN is to isolate the DM current and CM current from the power supply, and to minimize the impact of the CM current by returning it to its sources.
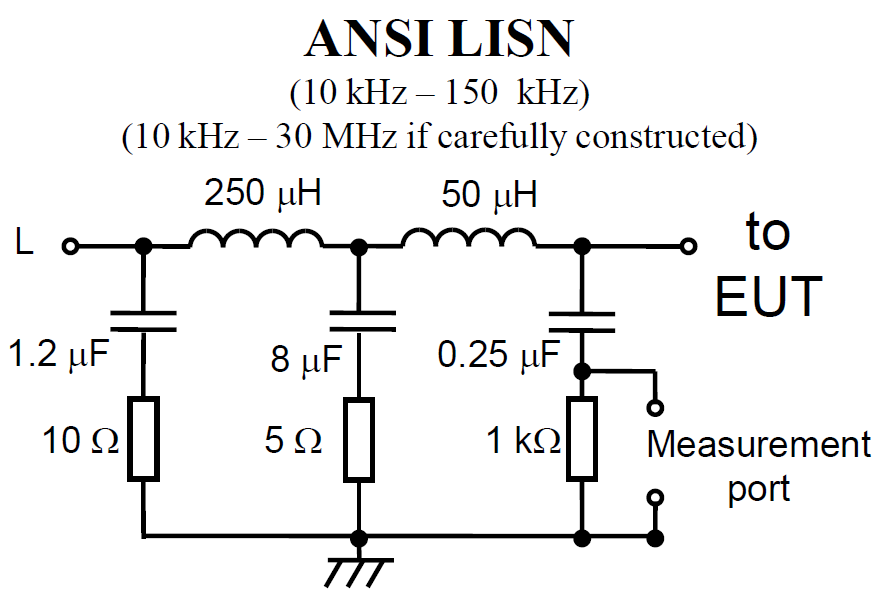
The wire harness inductance for large systems (aircraft) is 50μH whereas for small systems (automotive) is 5μH. However, the LISN selection criteria should be based on the frequencies of the measurements required.
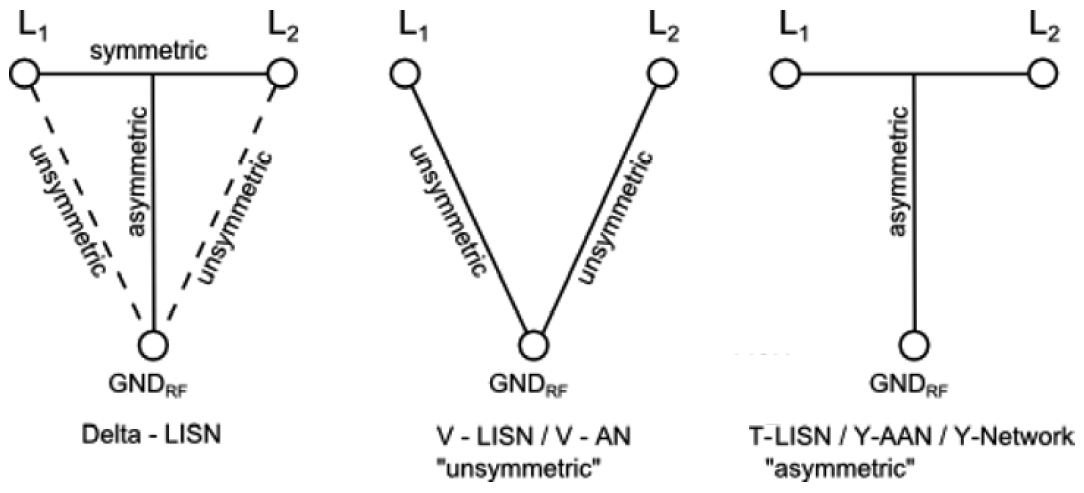
Types of LISN
- V-LISN: Unsymmetrical emissions (line-to-ground)
- Delta-LISN: Symmetric emissions (line-to-line)
- T-LISN: Asymmetric emissions (mid point line-to-line)
There are two types of V-LISN with different impedances.
- 5 µH inductance (CISPR 16-1-2, CISPR 25, ISO 7637, SAE J1113-41, DO160) are normally used to measure equipment for vehicles, boats and aircrafts connected to on-boards mains with DC or 400 Hz.
- 50 µH according to CISPR 16-1-2, MIL STD 461 and ANSI C63.4 is intended to operate at mains frequencies of 50 Hz or 60 Hz.
The T-LISN measures the asymmetric disturbance voltage (common mode voltage) and provides it to an EMI Receiver. It is normally used for measuring telecommunication and data transmission equipment connected to symmetrical lines as e.g. twisted pairs.
CISPR-25 (Ed 3.0)
A network inserted in the supply lead or signal/load lead of apparatus to be tested which provides, in a given frequency range, a specified load impedance for the measurement of disturbance voltages and which may isolate the apparatus from the supply or signal sources/loads in that frequency range.
CISPR-25 (Ed 3.0) & ISO-11452-2:2004 & ISO-11452-4
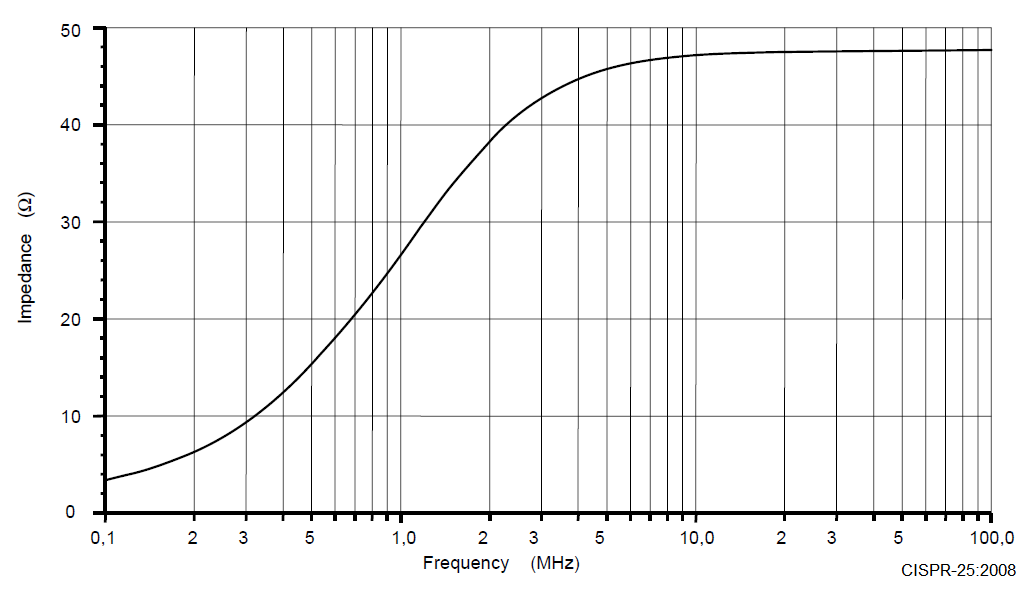
The AN impedance ZPB (tolerance ± 20 %) in the measurement frequency range of 0.1 MHz to 100 MHz it is measured between the terminals P and B with a 50 Ω load on the measurement port and with terminals A and B short-circuited.
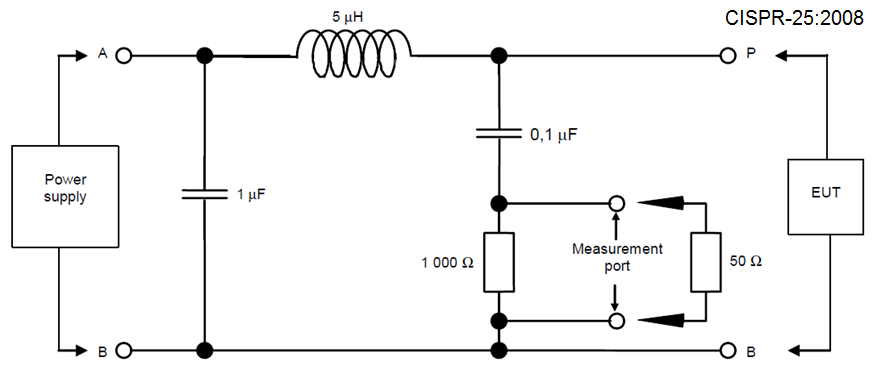
The 1μF capacitor is populated in CISPR-25 LISN; R=1Kohm.
ISO 7637-2:2011 & ISO-11452-2:2004 & ISO 7637-2:2004
The artificial network is used as a reference standard in the laboratory in place of the impedance of the vehicle wiring harness in order to determine the behavior of electrical/electronic devices.
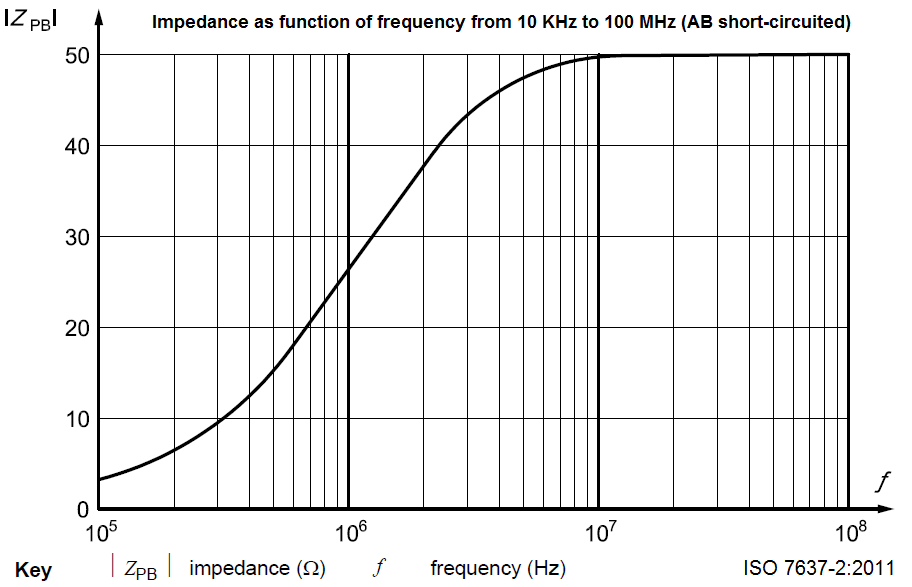
ISO 7637-2:2011 & ISO 7637-2:2004
The resulting values of impedance ZPB, measured between the terminals P and B while terminals A and B are short-circuited, are given in figure below as a function of frequency assuming ideal electric components. In reality, the impedance of an artificial network shall not deviate more than 10 % from the given curve.
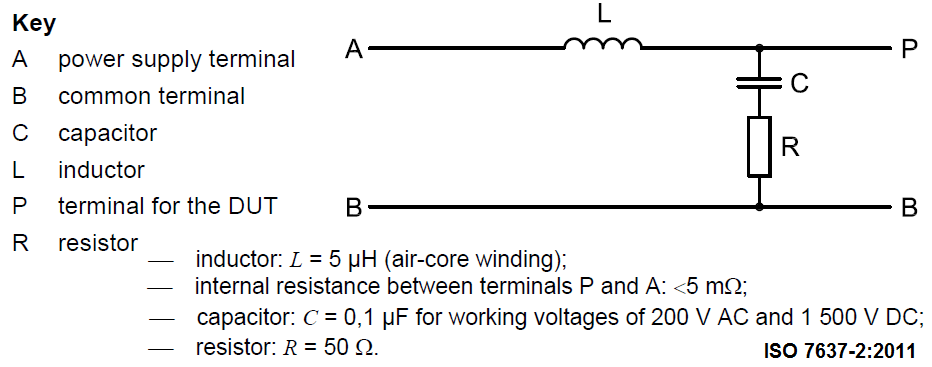
No 1μF populated in ISO 7637-2 LISN; R =50 ohm, C is function of voltage.
Sample setup: CISPR-25 require separate LISN for B+ and GND lines.
Christian Rosu